Mechatronics
Mechatronics

In my intro to Mechatronics class (ME 210), we were assigned with designing a robot that follows a line, picks up 5 rubber balls, and places them in the desired target. We were given 3 weeks to build it, and it was a great experience overall in teaching me about how to implement a successful mechatronic system. I learned how to setup the circuitry for various types of brushless DC motors & stepper motors, as well as design and manufacture parts that interface with electrical components. Overall, it was a very challenging but rewarding project.

Chassis
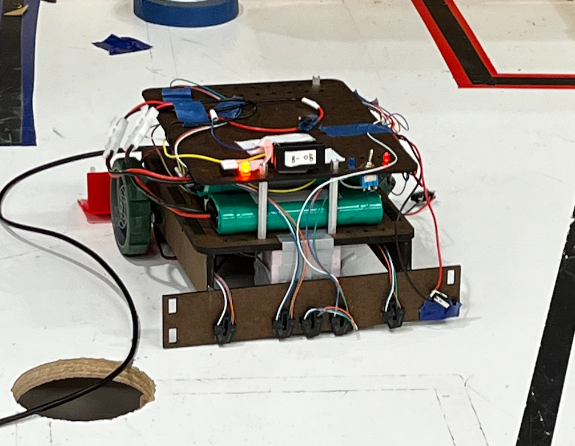
This an assembled view of what all the laser cut and 3-D printed parts look like when assembled (not including the scooper). We wanted to simplify the design in order to troubleshoot our electronics and code.

Roller Wheel
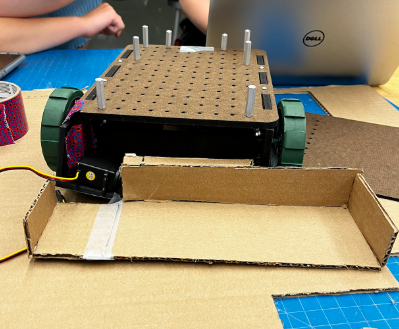
In order to balance out the two back wheels, we added a “roller wheel” in the front. We created a prototype support out of foam core, where we basically stuck nails through the holes on the chassis and all the way through the foam core. This attachment ended up working just fine, so we decided to keep it and focus on the more important functions of our robot.

Line Sensor Testing
This was our temporary set up to test the IR sensors, but our inconsistent values taught us that we needed to laser cut a stable back stop to hot glue them to.
-
![]()
After still not getting consistent readings from the IR sensors when having them aligned with the front wheels, we decided to add the IR sensors in front of the roller wheel instead. We hot glued a piece of duron to the sides and aligned 5 different IR sensors (instead of 3), which we found gave us more accurate readings.
-
![]()
After finally getting our robot to line follow somewhat consistently, we began to prototype with our scooper. We made a cardboard prototype in order to get the dimensions and make sure it would pick up the balls.
-
![]()
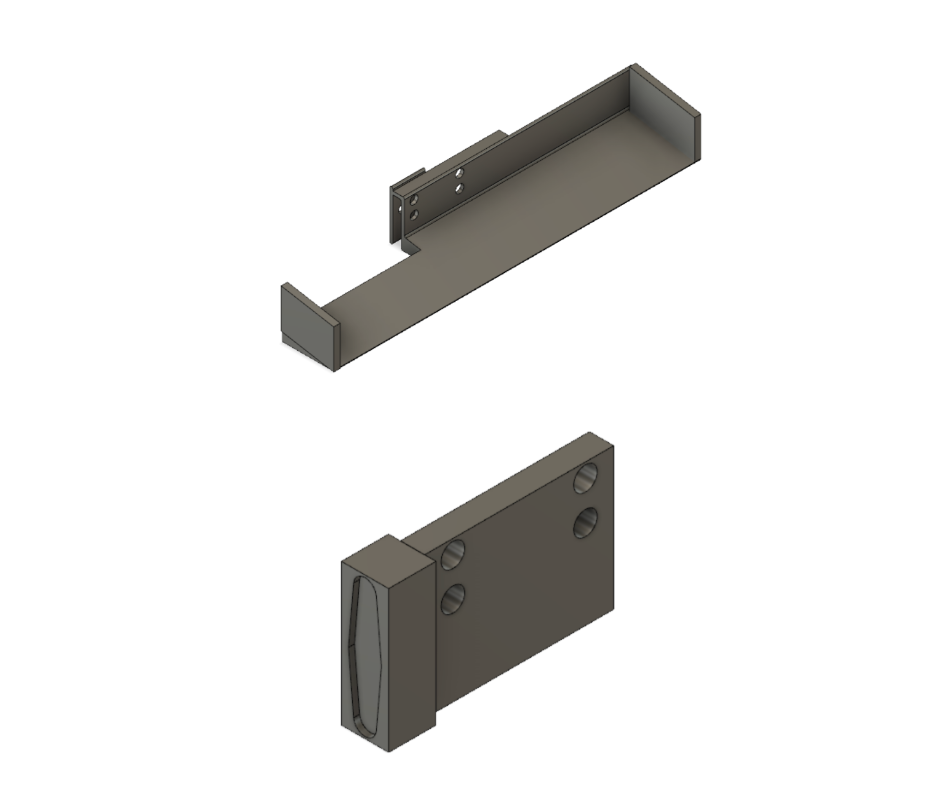
This prototype taught us that we needed to make the scooper sloped in order to pick up the balls, and also had a solid attachment to the servo motor. We 3-D printed the base and sides separately and hot glued them to reduce print time. We printed it out of PLA in order to reduce the load on the servo.
-
![]()
Just like most things in engineering, the assembly of the scooper didn’t go as planned. Our first 3-D print was barely big enough to fit 5 balls, so we improvised and attached the sides of our previous unsuccessful print to increase the length by an inch on each side. Also, our limit switch on the side of the scooper wasn’t always getting read because the opposite side of the scooper would hit the wall first. In order to fix this, we wrapped a rubber band around the side opposite of the limit switch to make the side with the limit switch always hit the wall first. In addition, this additional tension on the right side of the scooper helped brace the scooper for the impact it felt when hitting the wall.